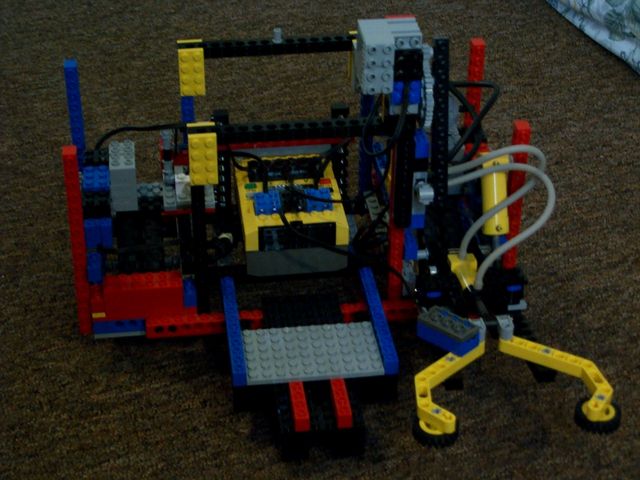
 Here's a picture of the front (taken without a flash). The gray plate in front is not actually used for anything, it's just there for strengthening. On the left side, you can see a red weight brick, which I have placed there to even out the weight distribution somewhat, so it rolls in a straighter line.
Here's a picture of the front (taken without a flash). The gray plate in front is not actually used for anything, it's just there for strengthening. On the left side, you can see a red weight brick, which I have placed there to even out the weight distribution somewhat, so it rolls in a straighter line.
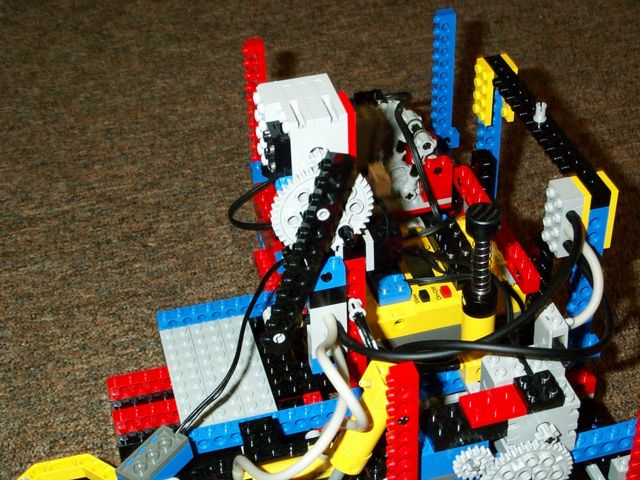
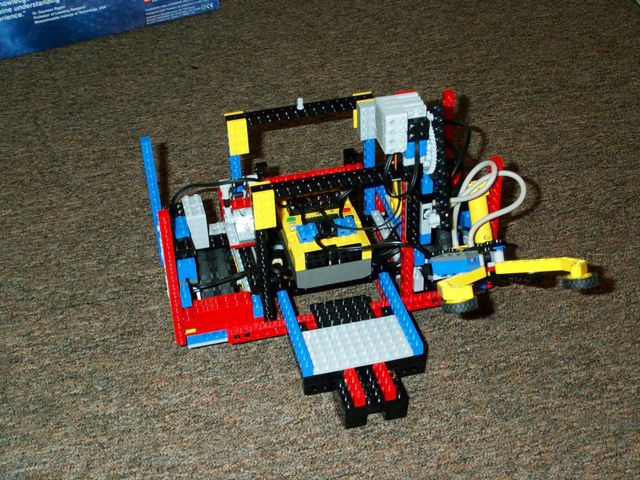 Picture of front, taken with flash.
Picture of front, taken with flash.
The thing on the left below and between the two yellow plates is a partially-built pressure switch, which I will use with the compressor I plan to add.
The bot runs on two pairs of large wheels, and two skid plates in the front.
 As you can see, I have already used up all of the RCX's inputs and outputs. This is likely to be a significant problem.
As you can see, I have already used up all of the RCX's inputs and outputs. This is likely to be a significant problem.
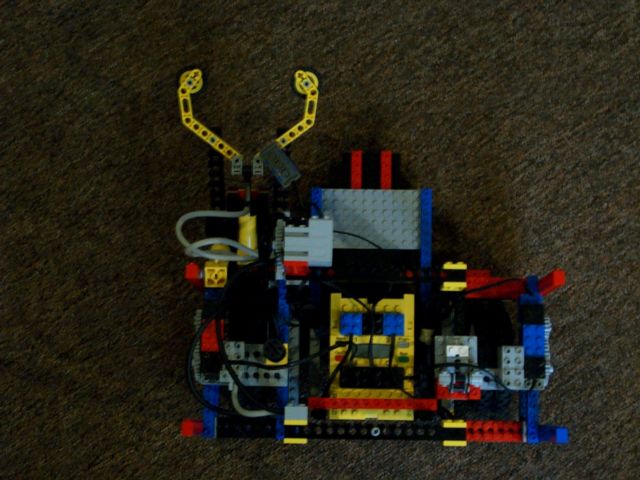
 The pneumatic claw is currently mounted on the left wheel module, and has two motions: open/close and up/down. Due to a lack of the necessary pneumatic components, the up/down motion is non-functional.
The pneumatic claw is currently mounted on the left wheel module, and has two motions: open/close and up/down. Due to a lack of the necessary pneumatic components, the up/down motion is non-functional.
I also do not yet have a small pump, so there is no compressor yet.
I have ordered a #9633 Dacta Pneumatics II set to get additional parts, including a compressor, air tank, switches, and T-joints.
 Here's the motorized pneumatic switch for the claw, mounted on one of the vertical beams. The peg on the 12-stud black beam is pushed into one of the axle holes on the 40-tooth gear. The black friction peg is a stop to make sure the switch doesn't overshoot.
Here's the motorized pneumatic switch for the claw, mounted on one of the vertical beams. The peg on the 12-stud black beam is pushed into one of the axle holes on the 40-tooth gear. The black friction peg is a stop to make sure the switch doesn't overshoot.
(See also the separate Pneumatic Switch page.)
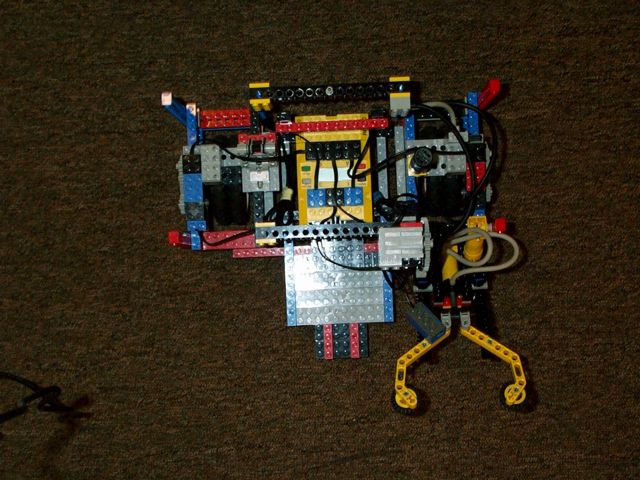
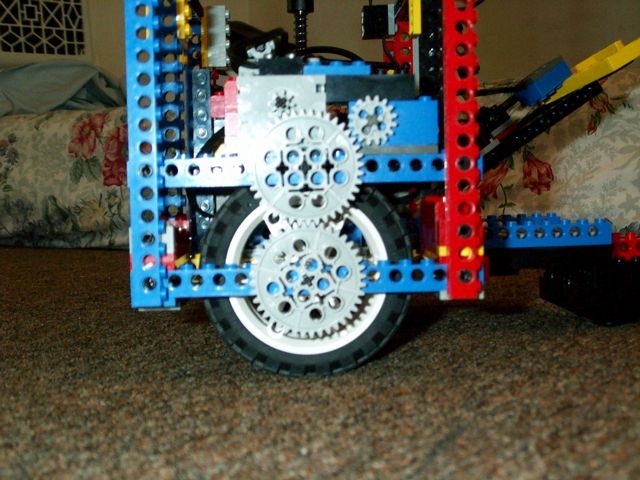 Instead of bumpers, this bot uses stall detection through a rotation sensor on each wheel.
Instead of bumpers, this bot uses stall detection through a rotation sensor on each wheel.