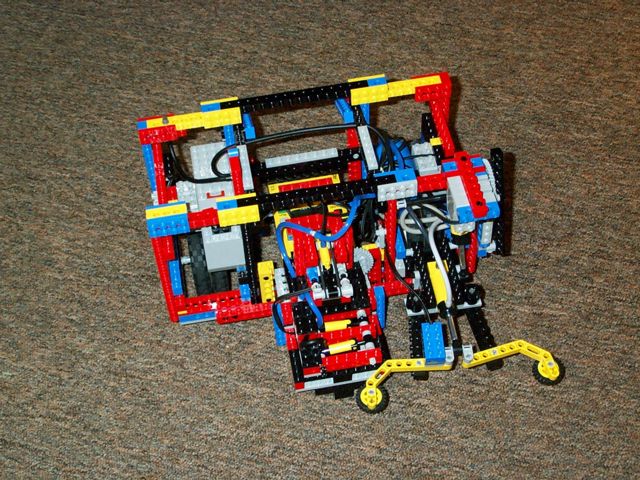
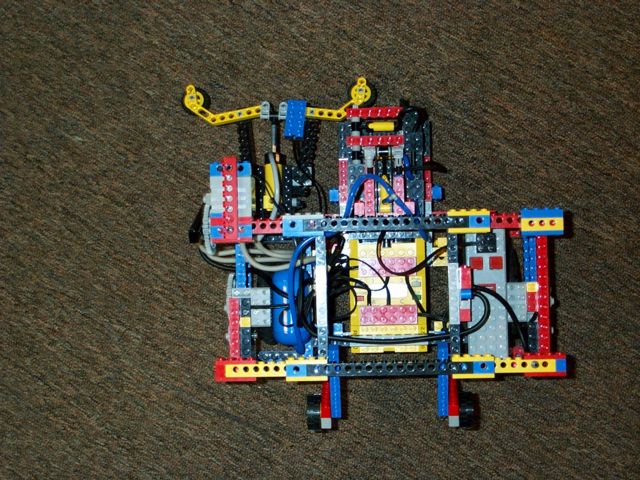
 Here you can see most of the additions and modifications.
Here you can see most of the additions and modifications.
The black pneumatic hose running across the middle of the robot is a branch to a manual switch which allows releasing the pressure in the circuit out the other black hose which is near the battery box. There is a connector at the end of that hose, which can be used for supplying pressure to other devices.
 Since I only have enough outputs for one pneumatic switch, both cylinders of the claw are run off the same switch. The two T-connectors visible split the hoses to each cylinder.
Since I only have enough outputs for one pneumatic switch, both cylinders of the claw are run off the same switch. The two T-connectors visible split the hoses to each cylinder.

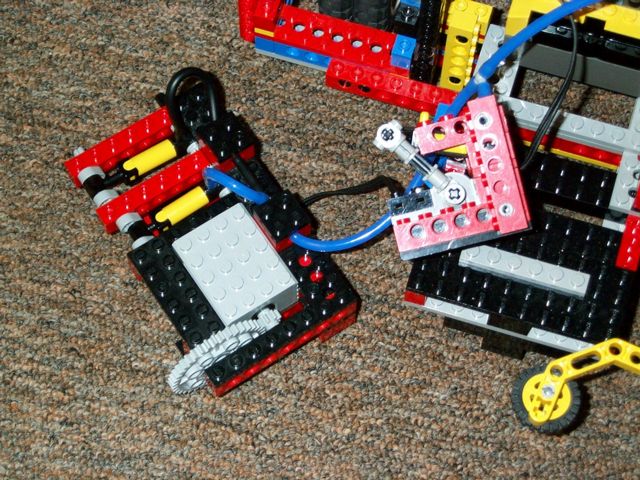 The compressor and pressure switch removed from their mounts.
The compressor and pressure switch removed from their mounts.
The compressor is a double-acting version of the one in set #9633. I tried using Michael Powell's compressor, but it tends to stall if the batteries aren't fully charged. This one, while rather large, is reasonably fast, and can produce great pressure.
The pressure switch is Sergei Egorov's design, adjusted for maximum pressure. The extra beams on top are to prevent the switch from rotating back into the next 'off' position.
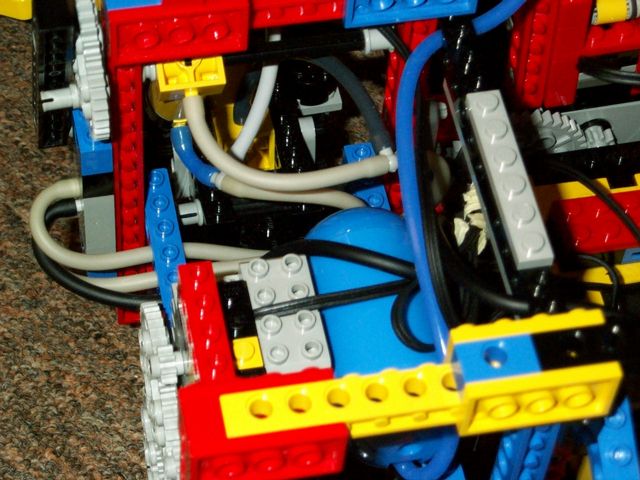
 I had to move the pneumatic switch to the outer side to set up the new frame design.
I had to move the pneumatic switch to the outer side to set up the new frame design.
The hoses for the switch run into holes in the horizontal beam to keep them neat.
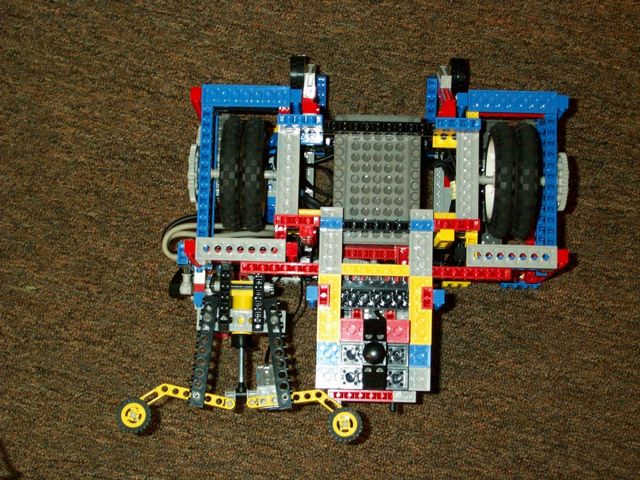
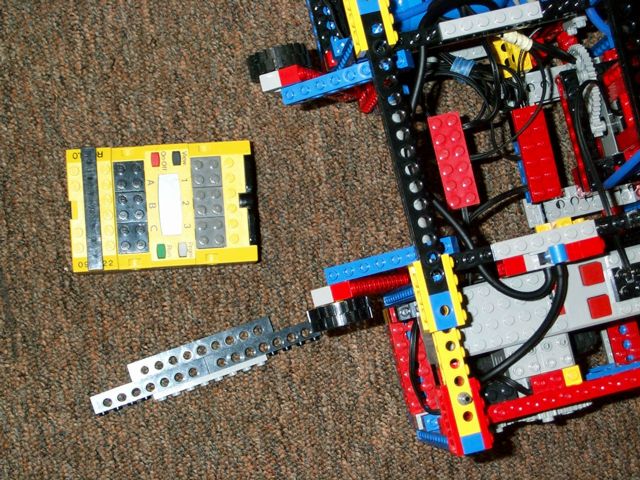 To facilitate battery removal/recharging/replacement, I have designed the RCX mounts so that it can be removed. The RCX is normally sitting on top of two beams (see picture of bottom), and held in place by the bar shown in the lower-left of this picture, which rests on top of the 1x8 black tile on the RCX.
To facilitate battery removal/recharging/replacement, I have designed the RCX mounts so that it can be removed. The RCX is normally sitting on top of two beams (see picture of bottom), and held in place by the bar shown in the lower-left of this picture, which rests on top of the 1x8 black tile on the RCX.
The red 2x6 plates hold the connectors in position for reconnecting to the RCX.
 The angled frames with wheels on the rear are present to prevent the robot from tipping over backwards.
The angled frames with wheels on the rear are present to prevent the robot from tipping over backwards.
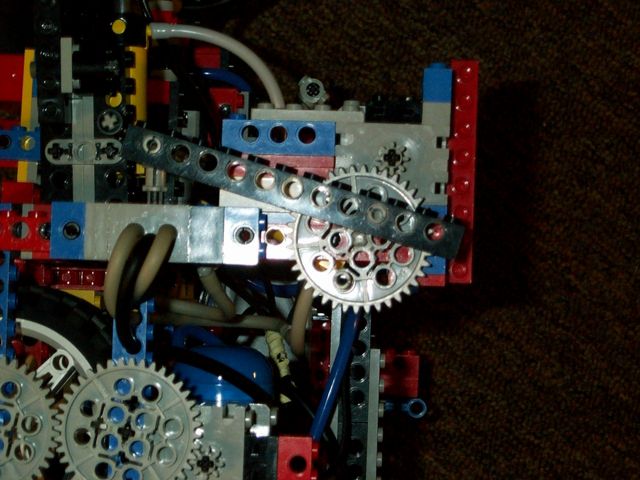
 The rotation sensor has been re-geared so that it can detect finer motions, allowing for more precise movement.
The rotation sensor has been re-geared so that it can detect finer motions, allowing for more precise movement.
You can also see the new location of the pneumatic switch.